
Important Notice
The prosthetic project is currently on hold due to high certification costs. Your support for the robotic version will help us generate the funds needed to bring the prosthetic version to life. Together, we can make it happen!
Features
Strong
Cheap (it will be provided through each country’s National Health System)
Rotatable passive Wrist
Active Fingers: 5 DOF (Index, Middle, RingLittle, Thumb Flexion, Thumb Rotation)
Sensors: Two dry electrode sensors (skin surface) with Reliable EMG readings
Control: Voluntary Close, Voluntary Open
New Socket Design

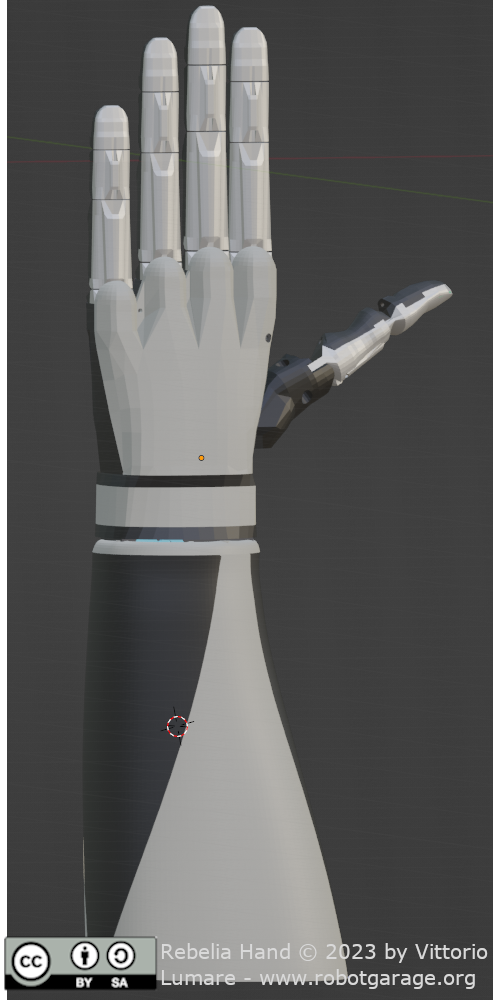




Current prototype




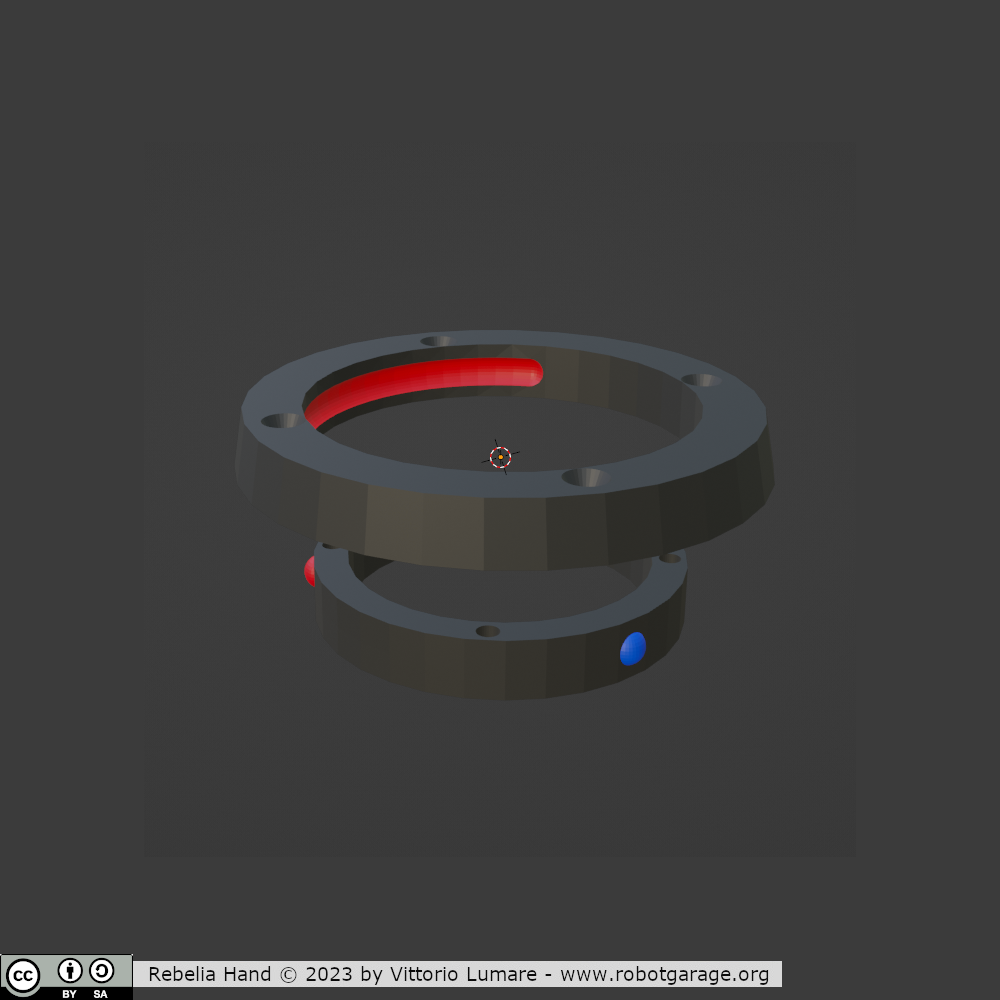
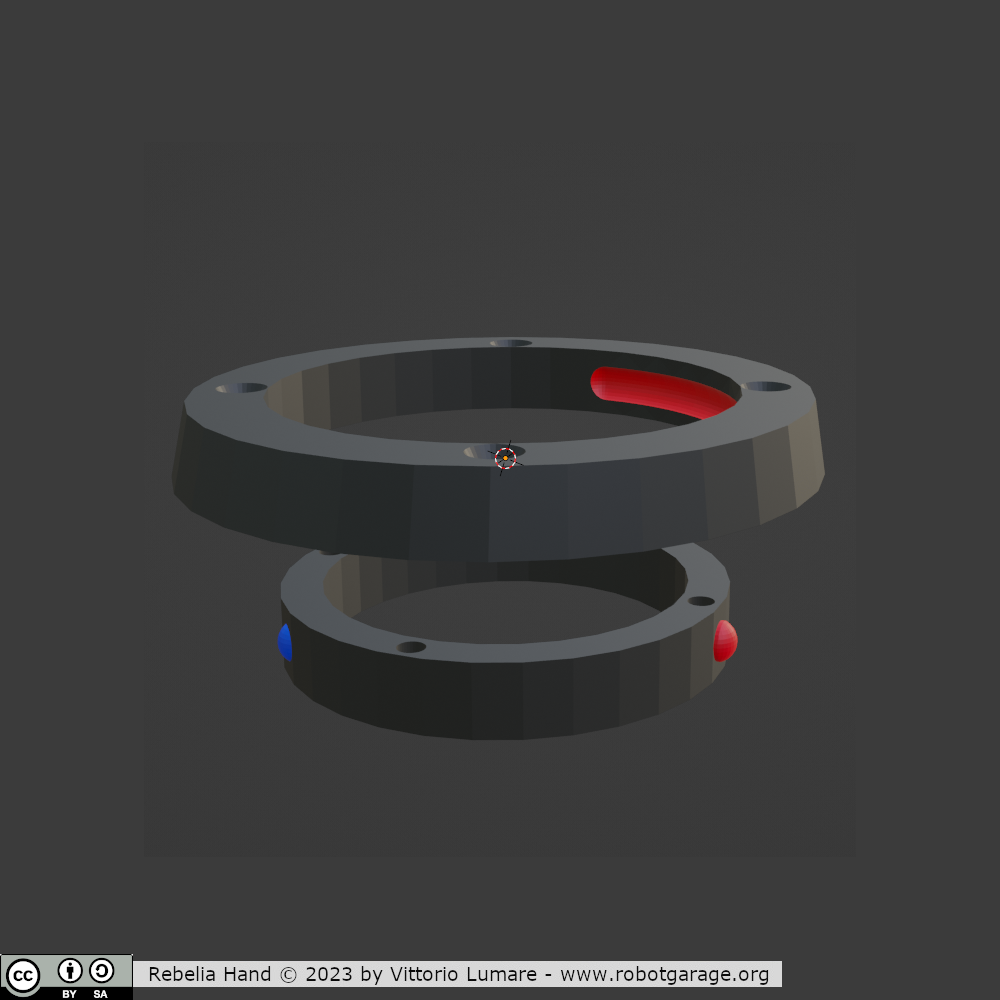
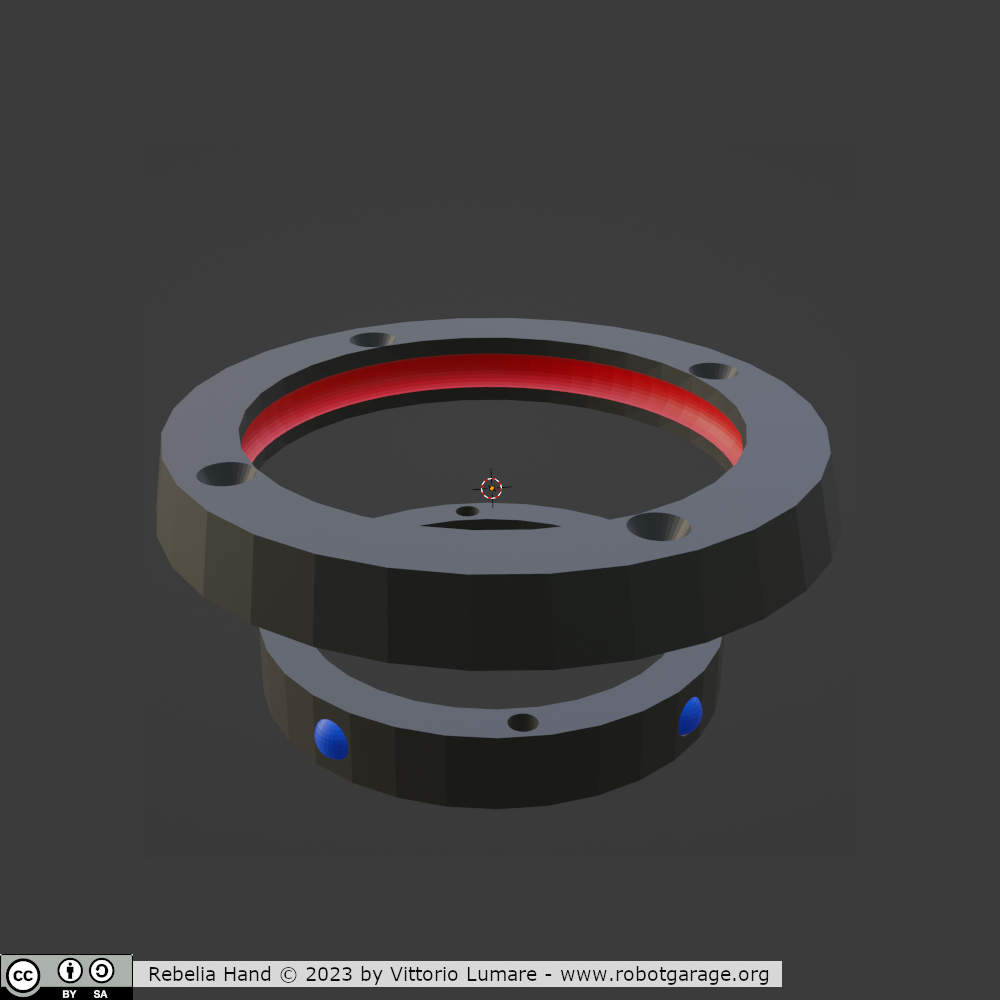
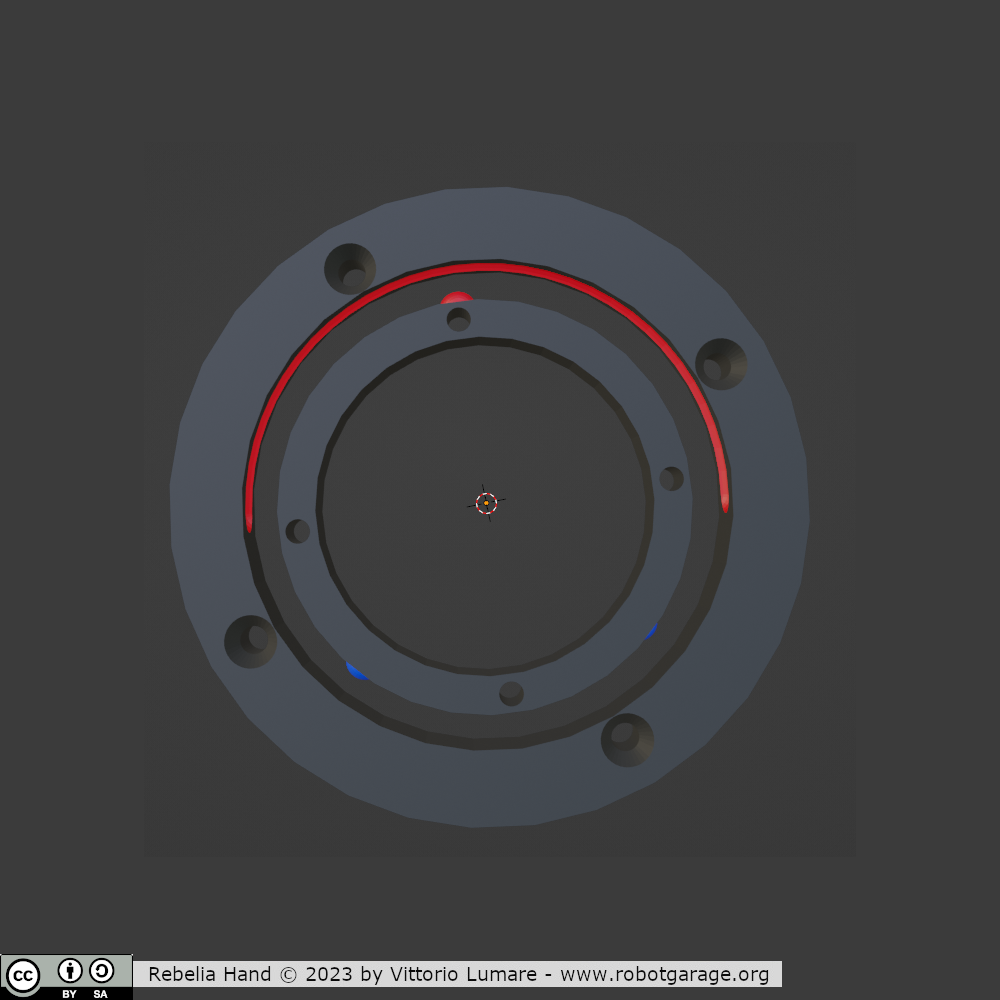
Wrist detail
The wrist has a limited range of +90 -90 degrees.
The red ball pin is rigid and can slide along the red canal, ensuring the range limitation.
The blue ball bearings are soft material (TPU 82A). They exert a certain amount of pressure on the outer ring, keeping the wrist firmly at its current position, but still allowing the user to rotate it by applying a stronger torque.
Progress
UPPER PART: SEE THE ROBOTIC VERSION
BATTERY SELECTION 100%
CUSTOM EMG SENSORS (DFRobot) SELECTION 100%
ELECTRONICS BOARD DEVELOPMENT 100%
WRIST DESIGN & TEST 100%
LOWER FOREARM COVER DESIGN & TEST 100%
UPPER FOREARM COVER DESIGN & TEST 95%
AESTHETIC DESIGN FOR HAND AND FOREARM 0%
WEIGHT REDUCTION 0%
Components
MCU: ESP32 DevBoard
EMG Sensors: DFRobot-EMG-Sensor
ServoMotors: WaveShare ST3215
Batteries: Li-PO 12V GFC Energy 1800mAh
Link to EU Project Collaboration
Editorial contents of this web page such as texts, photos and videos, are released as Creative Commons Attribution ShareAlike 4.0. © 2023-2024 by Vittorio Lumare is licensed under CC BY-SA 4.0![]()
![]()
![]()